

Projects
Computational Fluid Dynamics (CFD)
03/2022 - 06/2022
Project Information
Conduct 2D CFD on airfoil in MATLAB
Software
MATLAB
What I did
-
Created MATLAB code to analyze lift and drag coefficient of 2D incompressible potential flow over NACA 0012 using both source panel and Jacobi finite differences methodology
-
Extrapolated the Jacobi finite differences reach 4th order accuracy in modeling lift and drag coefficient while source panel method only obtains 1st order accuracy
What I learned
-
Aerodynamic
-
CFD
-
Mesh design
-
Coding
-
Numerical method
 |  |  |
|---|---|---|
 |  |  |
09/2021 - 12/2021
Project Information
What I did
Conduct 2D CFD on airfoil and circular cylinder in COMSOL
Software
-
COMSOL
What I learned
-
Investigated lift and drag between symmetrical airfoil NACA 0010 and cambered airfoil NACA 4410 with various angles of attack from data, pressure contours, streamlining, and velocity vector
-
Concluded cambered airfoil NACA 4410 developed a higher coefficient of lift than symmetrical airfoil NACA 0010 when angle of attack exceeded 8 degrees
-
Aerodynamic
-
CFD
-
Mesh design
-
Computational load
 |  |  |
|---|---|---|
 |
01/2023 - 03/2023
Project Information
Conduct 2D CFD on airfoil and nosecone in Ansys Fluent
Software
Ansys Fluent
What I learned
-
Aerodynamic
-
CFD
-
Simulation and experimental data evaluation Rocket's stability from fin design and placement
What I did
-
Investigated lift, drag, pressure, and flow separation of airfoil for the rocket fin
-
Since we have 2 stage rocket, it is crucial to minimize downwash and downstream turbulence of the first stage fin
-
Trade studies on which nose cone and fin are ideal for the rocket to reach the highest apogee while being stable
-
Compare and analyze the differences between the Ansys and the wind tunnel results
 |  |  |
|---|
Finite Element Analysis (FEA)
Project Information
Conduct FEA on rocket airframe and pressure vessel
Software
SOLIDWORKS
What I did
-
FEA on rocket airframe and pressure vessel with Aluminum 3003-H14, Titanium Ti-6Al-4V, and Carbon Composite of different thickness
-
Analyze their yield stress, buckling, strain, and factor of safety. Produced a trade study and chose Carbon Composite
-
Assembled the 3 ply Carbon Composite and test them through the Instron machine to see the differences between FEA and actual results.
What I learned
-
FEA
-
Manufacturing
-
Factor of Safety
-
Material Science
-
Mesh
 |  |  |
|---|---|---|
 |  |  |
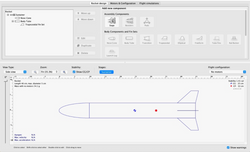
Stability and Trajectory Analysis
03/2023 - 06/2023
Project Information
What I did
Analyze rocket's stability and its flight trajectory simulation
Software
-
MATLAB
-
OpenRocket
What I learned
-
Developed MATLAB code computing the Euler-Cauchy matrix in determining thrust and propeller’s torque.
-
Developed Monte Carlo algorithm to find the ideal propeller's location on blimp for stability and controllability
-
Upgraded last year's envelope's material by employing lightweight PVC Bladder material, reducing weight by 10% while attaining a higher payload capacity of 30%
-
Conduct rocket's stability analysis by finding center of pressure, fin and body interference factor, span length at chord of fins, normal force on fins, normal force on fins with body, and static margin
-
Compare the results with OpenRocket and yielded 98% accuracy
-
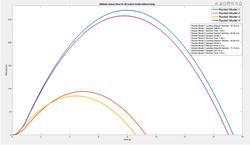
Produced trajectory simulation of the rocket from burnout, cruise, to descent stage
-
Compute the trade studies with different thrust profile and drag
-
Compare the result with OpenRocket and the rocket model kit
-
Find the minimum fuel needed for rocket to reach Karman Line with constant max thrust
-
OpenRocket
-
Stability and its importances
-
Fin's role in rocket stability
-
Karman Line
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |
Combustion
03/2023 - 06/2023
Project Information
Analyze various form of rocket's motor performance
What I learned
-
Programming
-
Rocket motor performance
-
Creative ways to increase efficiency
-
Hot Fire Test
What I did
-
Produced a program to compute hybrid rocket motor regression rate throughout entire burn time
-
Study the effect of Oxidizer/Fuel ratio to the mass flow rate
-
Investigate the effect of product species dissociation with the combustion temperature
-
Compute the numerical solution for the B6 solid motor thrust profile
-
Conduct a performance of solid composite motor through exhaust velocity, specific impulse, and combustion temperature
-
Explore the performance effect of suspending metal particles in a solid propellant
-
Examine the hybrid rocket motor temperature through absorbance range and wavelength from the nozzle flame
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |
Optimal Orbital Transfer Trajectory from Low Earth Orbit (LEO) to Geostationary Orbit (GEO)
09/2023 - 12/2023
Project Information
What I did
Find the fuel optimal orbital trajectory for spacecraft to transfer from LEO to GEO.
Software
-
Python
-
MATLAB
-
Utilized an indirect method from the calculus of variations and Pontryagin’s Maximum Principle, we transform this problem into a Two-Point Boundary Value Problem (TPBVP).
-
Derived of mathematical model and use the MATLAB’s built-in functions such as bvpinit and bvp4c to provide accurate initial guesses and solve the problem numerically.
-
Found that with a constant thrust of 20 Newton, the spacecraft can maneuver from LEO to GEO in 3.97 days by controlling the gimbal angle.
-
Introduced the costate variables and formulate the Hamiltonian equation to captures the dynamics and the cost functions of our system.
-
Solved the optimality’s necessary condition to satisfy the Euler-Lagrange equation, transversality and boundary conditions
-
Produced a similar results through trial and error in initial guess through Python code
What I learned
-
Optimal Control
-
Mathematical derivation
-
Attention to details
-
Numerical method
-
Programming
 |  |  |
|---|---|---|
 |  |  |
 |
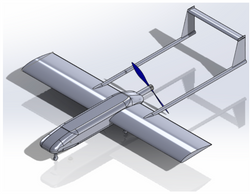
Unmanned Aerial Vehicle (UAV) Design - BP3000
01/2023 - 03/2023
Mission Objective
What I did
-
Bird Protector 3000 (BP3000) is an unmanned aerial vehicle (UAV) designed to patrol and protect birds from striking wind turbines
-
Patrol 50 acres of wind turbine farm at a cruise speed of 135 ft/s
-
Once a bird is entering the 2500 ft radius from the farm’s perimeter, BP3000 will start to engage
-
BP3000 will dive from 700 ft to 600 ft towards the bird
-
Within a striking distance of 10 ft, BP3000 will target the bird and release a 5 lb of payload of water
-
The bird’s route will be redirected and a potential fatal collision avoided
Mission Requirements
-
Endurance: 8 hours
-
Stall speed: 81 ft/s
-
Minimum cruising altitude: 700 ft
-
Payload: 45 lb of water
Software
-
Designed and calculated the aircraft parameters and dimensions
-
Performed Nikolai weight convergence calculation
-
Conducted performance specifications of the UAV that include coefficient of lift, coefficient of parasite drag, coefficient of induced drag, lift versus drag, combined drag, power required, rate of climb,
-
Determined the stability and control, static margin, elevator deflection, tail incidence, stability derivatives
-
Computed the Monte Carlo and Genetic Algorithm (GA) to optimize the UAV to accomplish its mission
-
Generated 1 million UAV's to optimize the wing span, wing area, wing chord, horizontal tail span, horizontal tail area, horizontal tail chord, fuselage length, fuselage width, fuselage height, and payload's location
-
The GA's fitness function aimed to minimize weight, low stall speed of 81 ft/s, high endurance of more than 8 hours, stability within 0.15 from neutral point, tail incident of less than 3 degrees at cruise speed, elevator deflection within +- 15 degrees through all operational speed
-
Evaluated the lateral and longitudinal motion of roll root, dutch roll root, spiral root, short period, phugoid
-
SolidWorks
-
MATLAB
-
Simulink
What I learned
-
Simulink and simulation of different scenarios
-
Waypoint guidance
-
Genetic Algorithm
-
Monte Carlo
-
Aircraft design
-
Aircraft control and stability
 |  |  |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |